Estancia de Investigación EI-AD25-145 - Applications of robotics in precision agriculture - Teleoperation of Robotic Arms for Remote Agricultural Tasks
This research project explores the development of a teleoperated robotic system designed to perform agricultural tasks remotely, enhancing precision and accessibility in controlled farming environments. The system centers around the UArm Lite 6 robotic arm, integrated with Unity, ROS, and Python, and visualized through the Meta Quest 3 headset to enable immersive, intuitive control.
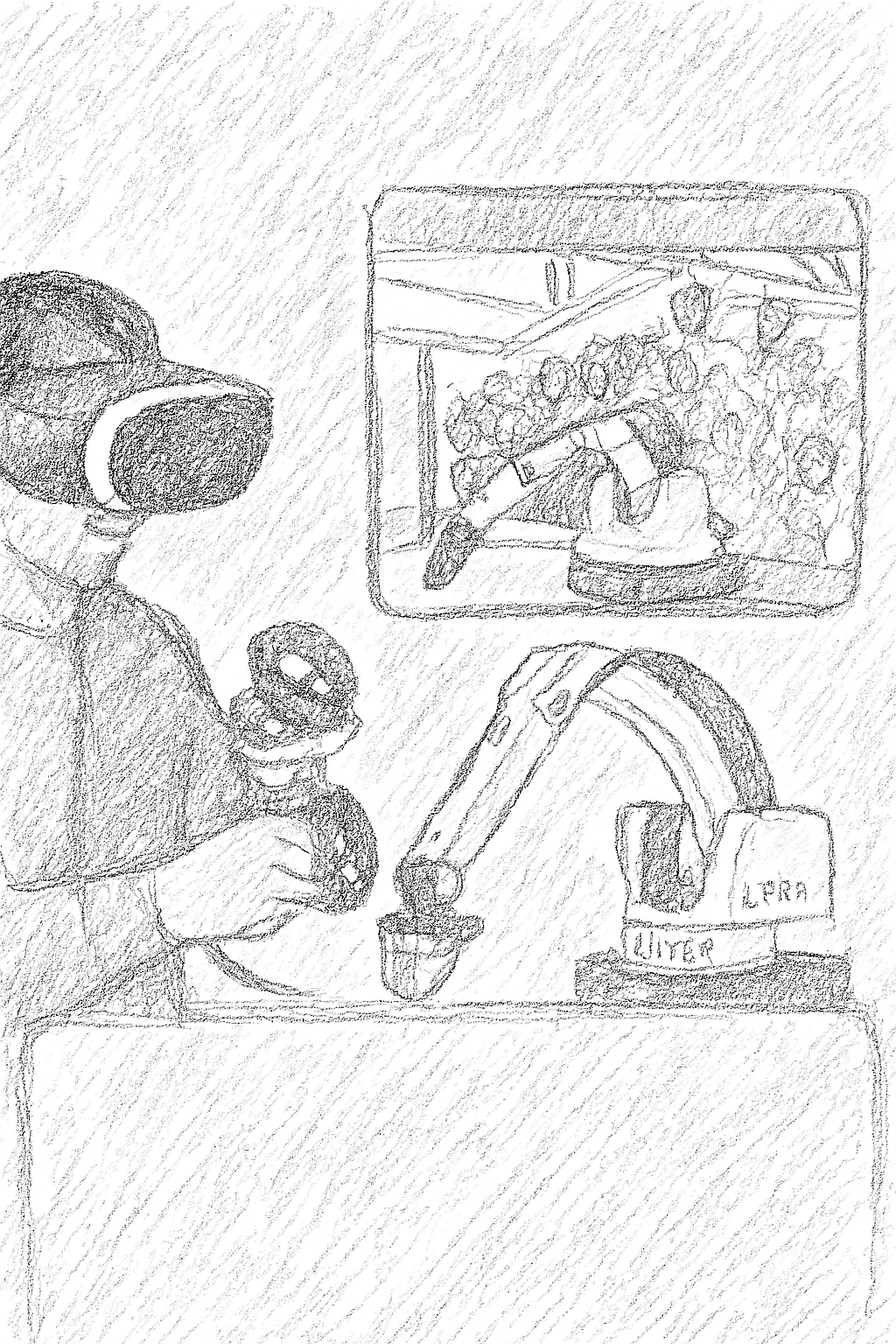
The goal is to create a responsive and user-friendly interface that allows operators to manipulate the robotic arm in real time, performing tasks such as selective harvesting, plant inspection, or sample collection from a distance. By combining robotics with virtual reality, the project aims to bridge the gap between human dexterity and remote automation, especially in scenarios where physical presence is limited or impractical.
The Meta Quest 3 provides a stereoscopic view of the agricultural environment, while Unity handles the 3D simulation and interaction logic. ROS facilitates communication between the software and the UArm Lite 6 hardware, and Python is used for scripting control behaviors, data handling, and system integration.
In addition to technical development, the student will conduct a review of state-of-the-art teleoperation systems in agriculture, evaluating current approaches and identifying opportunities for innovation. The project emphasizes modularity, scalability, and real-world applicability, contributing to the broader goal of sustainable, tech-enabled farming.
This initiative represents a fusion of robotics, immersive technology, and agricultural engineering—paving the way for smarter, more accessible farming practices through remote human-robot collaboration.
Responsibilities
- Study current teleoperation systems in agriculture and related fields
- Set up and calibrate the UArm Lite 6 robotic arm for remote control
- Develop a VR interface using Unity and Meta Quest 3 for intuitive teleoperation
- Integrate Unity with ROS to enable real-time communication between the VR environment and the robotic arm
- Use Python to script motion control, task automation, and system feedback
- Test the system in simulated agricultural scenarios such as fruit picking or plant inspection
- Document technical progress, challenges, and final results for evaluation and future development
Working Plan
- Begin with a review of state-of-the-art teleoperation technologies in precision agriculture
- Assemble and configure the UArm Lite 6 robotic arm and ensure basic control via Python
- Design and implement a VR interface in Unity, compatible with Meta Quest 3
- Establish ROS communication between Unity and the robotic arm for real-time control
- Simulate remote agricultural tasks and evaluate system responsiveness, accuracy, and usability
- Refine control algorithms and interface based on testing feedback
- Compile documentation including annotated code, system architecture, and performance metrics
- Maintain clear records of technical progress, integration steps, and testing outcomes.
- Prepare a final project report detailing system architecture, results, and future recommendations.
- Deliver a presentation of final results, demonstrating the teleoperation system and its agricultural applications.
40
Jesús Arturo Escobedo Cabello
arturo.escobedo@tec.mx
Robotics
Agriculture
Teleprescence
ROS
Unity




